SLAMVDB
"Large Scale Voxel Map with Open-set Semantics"
Category: Software Package
Use Cases: Autonomous robotics, UAV, UGV, Terrain Scanning, Infrastructure Scanning
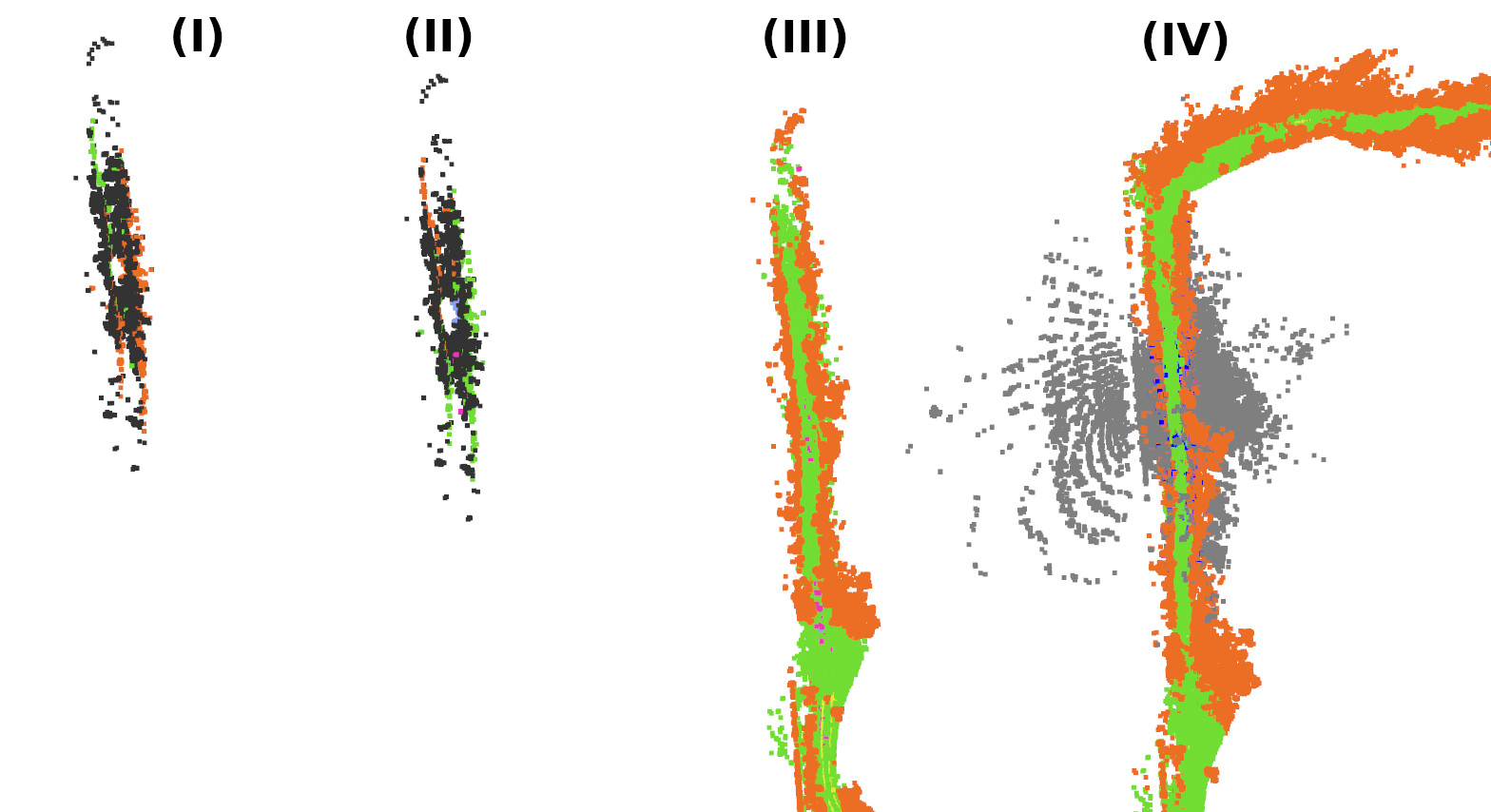
SLAMVDB is a collection of ROS2 packages implemented in C++ and Python, capable of building large scale voxel maps where each cell holds vision-language embedding vectors. Lookup operations in the map can be performed using vector similarity search. A terrain segmentation voxel classifier is also implemented, with a discrete set of query vectors optimized for the purpose using gradient descent on images.
Key Features
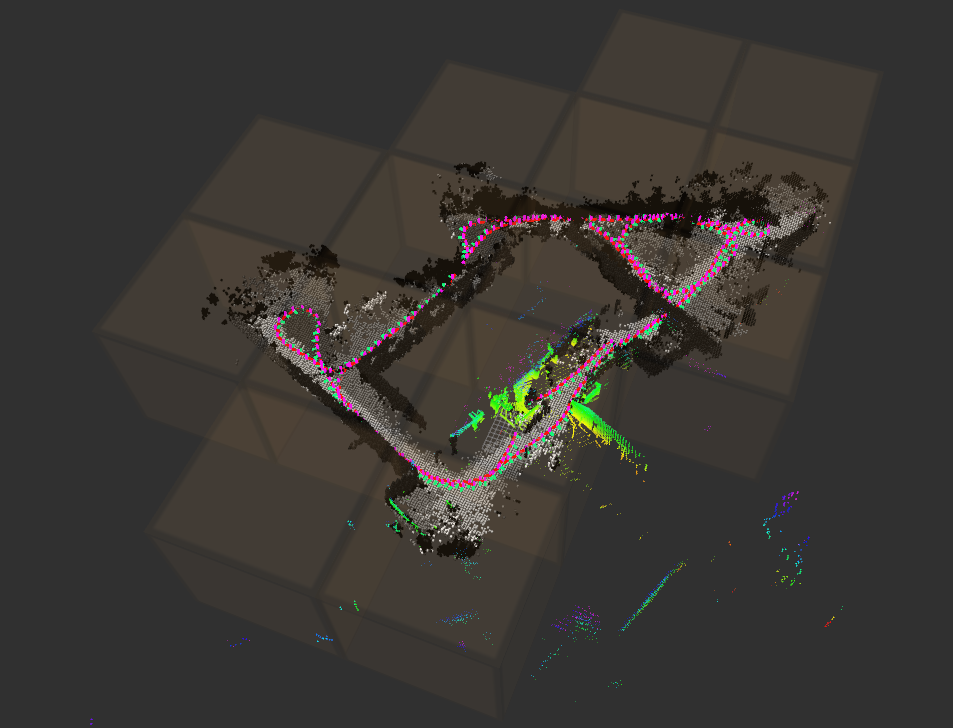
- Voxel maps - map size in memory bounded by trajectory length
- Submap and lookup grid cell partitioning - capable of holding very large maps and accommodating loop closures, GNSS corrections
- SLAM provider agnostic - ships with own ICP odometry and loop closing packages, but can use any SLAM system that implements the required interfaces
- Vision model agnostic - with minor adaptations, use a variety of image and text embedding models
Use Cases
SLAMVDB has so far primarily been developed with navigation for autonomous robotics in mind - finding traversible paths across difficult terrain. But ongoing and future research is exploring applications in UAV-based scanning and monitoring of landscapes and infrastructure, as well as integrating into construction site monitoring systems.
Gallery