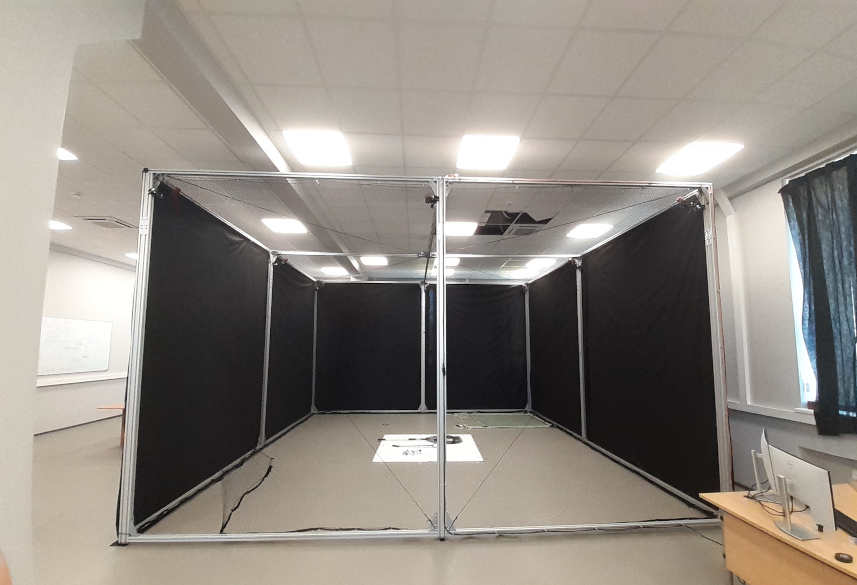
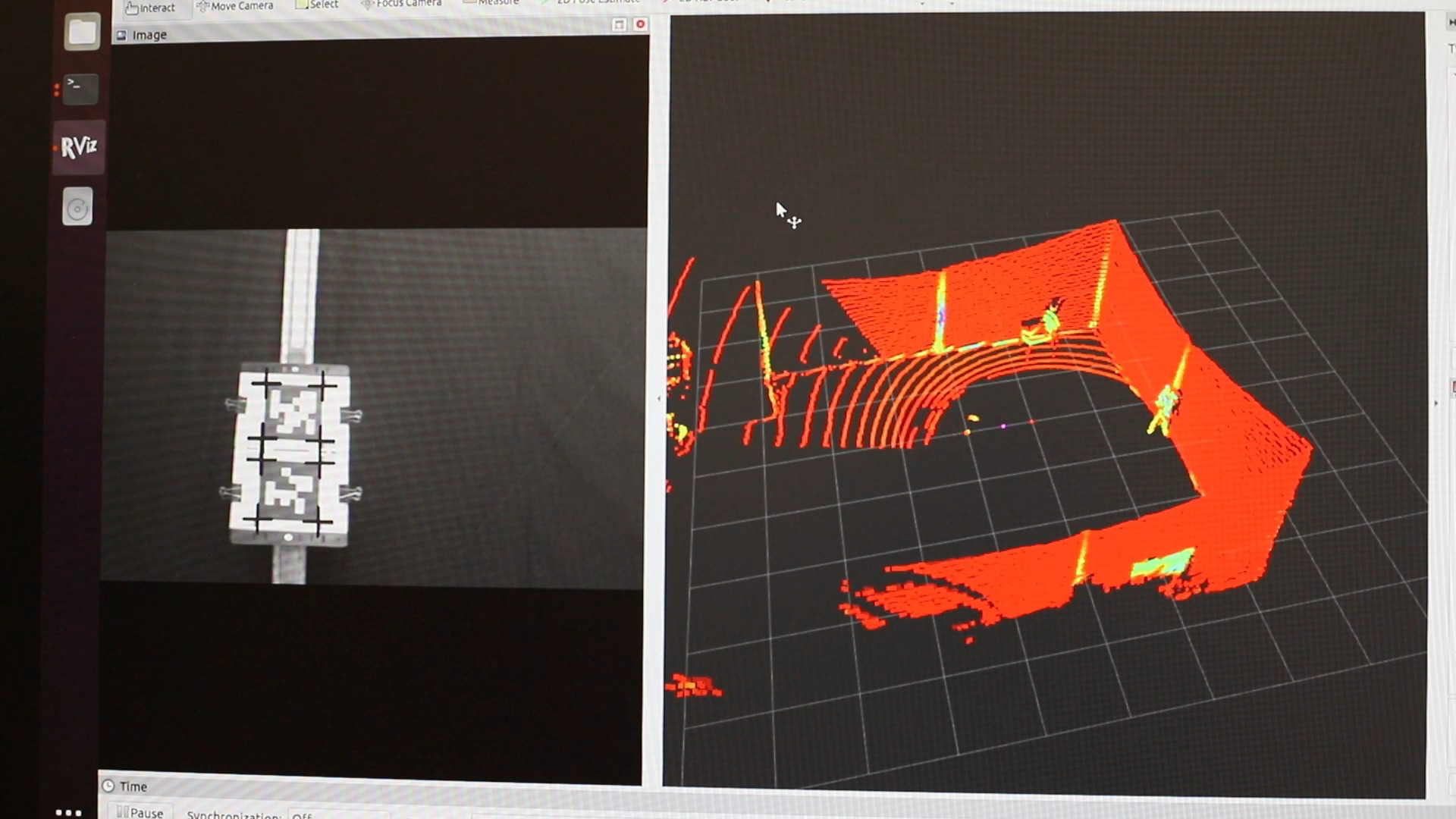
High-frequency tracking of object poses
Collect SLAM data by hand, on vehicles or on robots
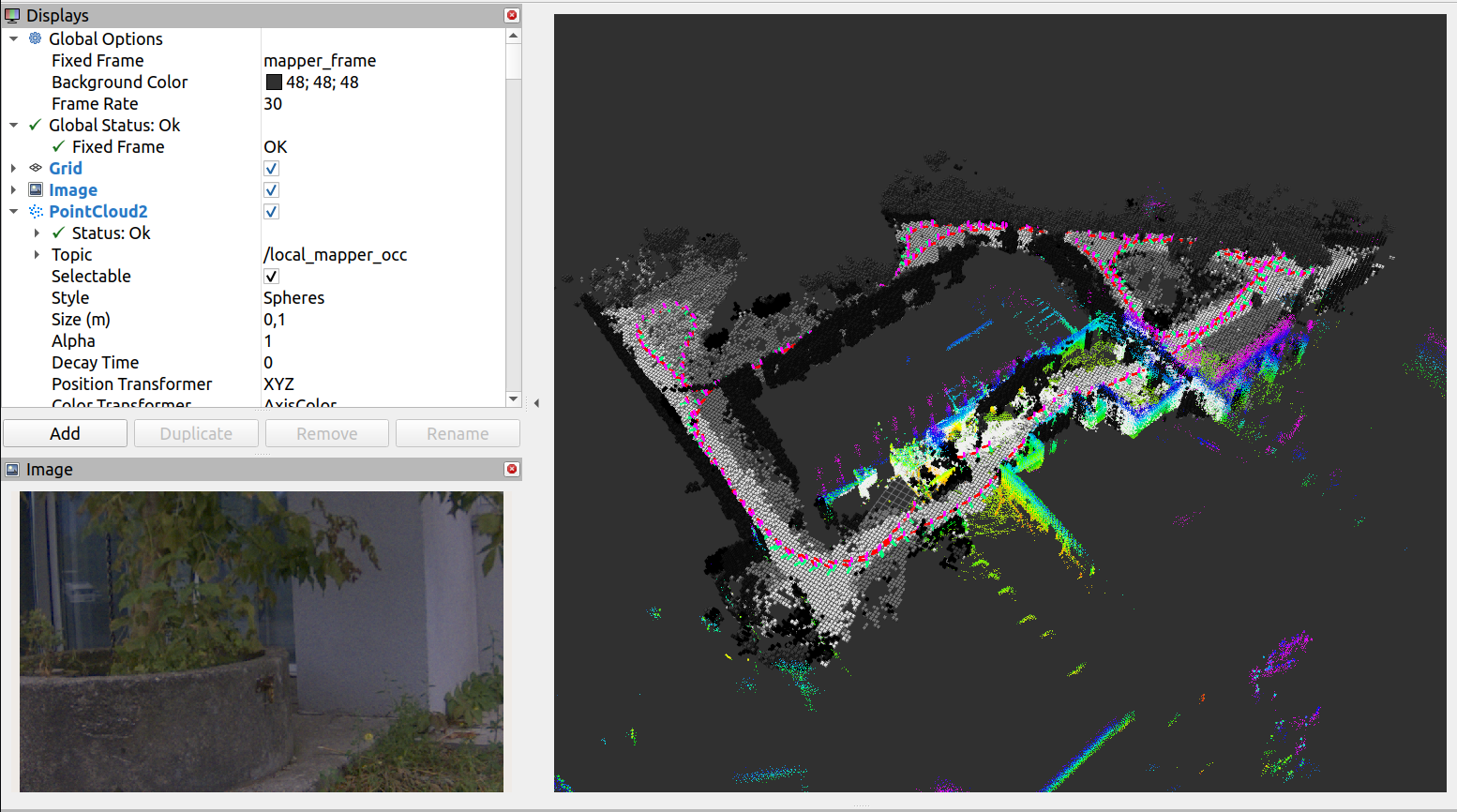
Large Scale Voxel Map with Open-set Semantics
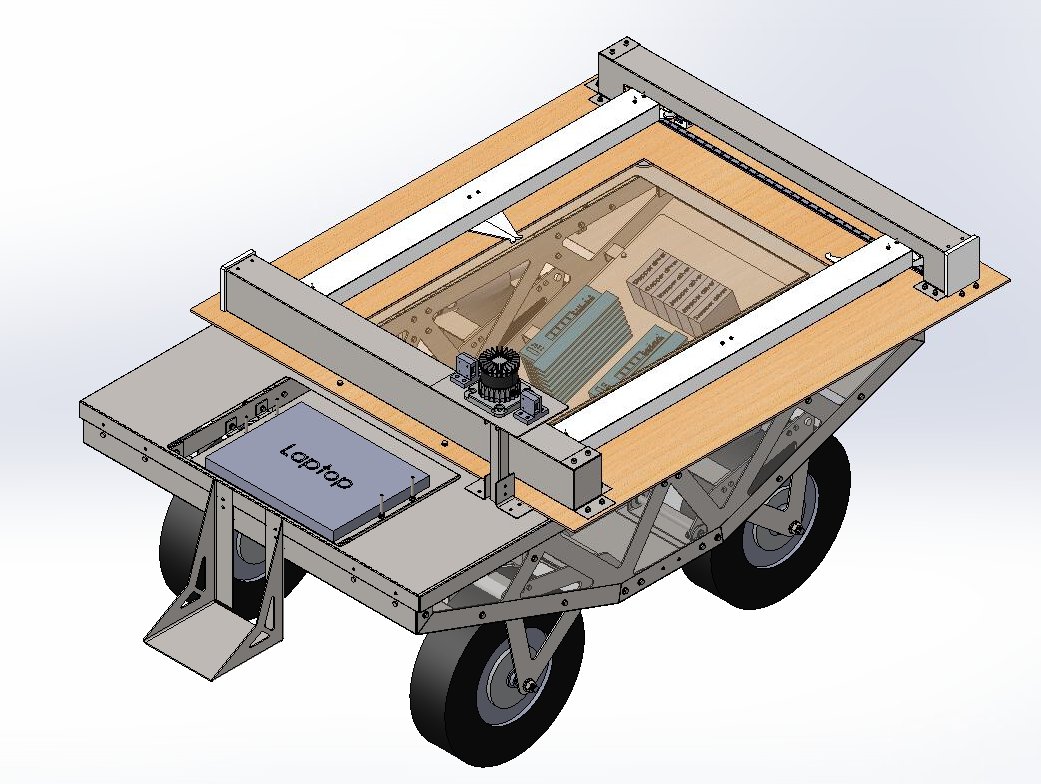
Testbed for UGV autonomy and UGV-UAV collaboration technologies
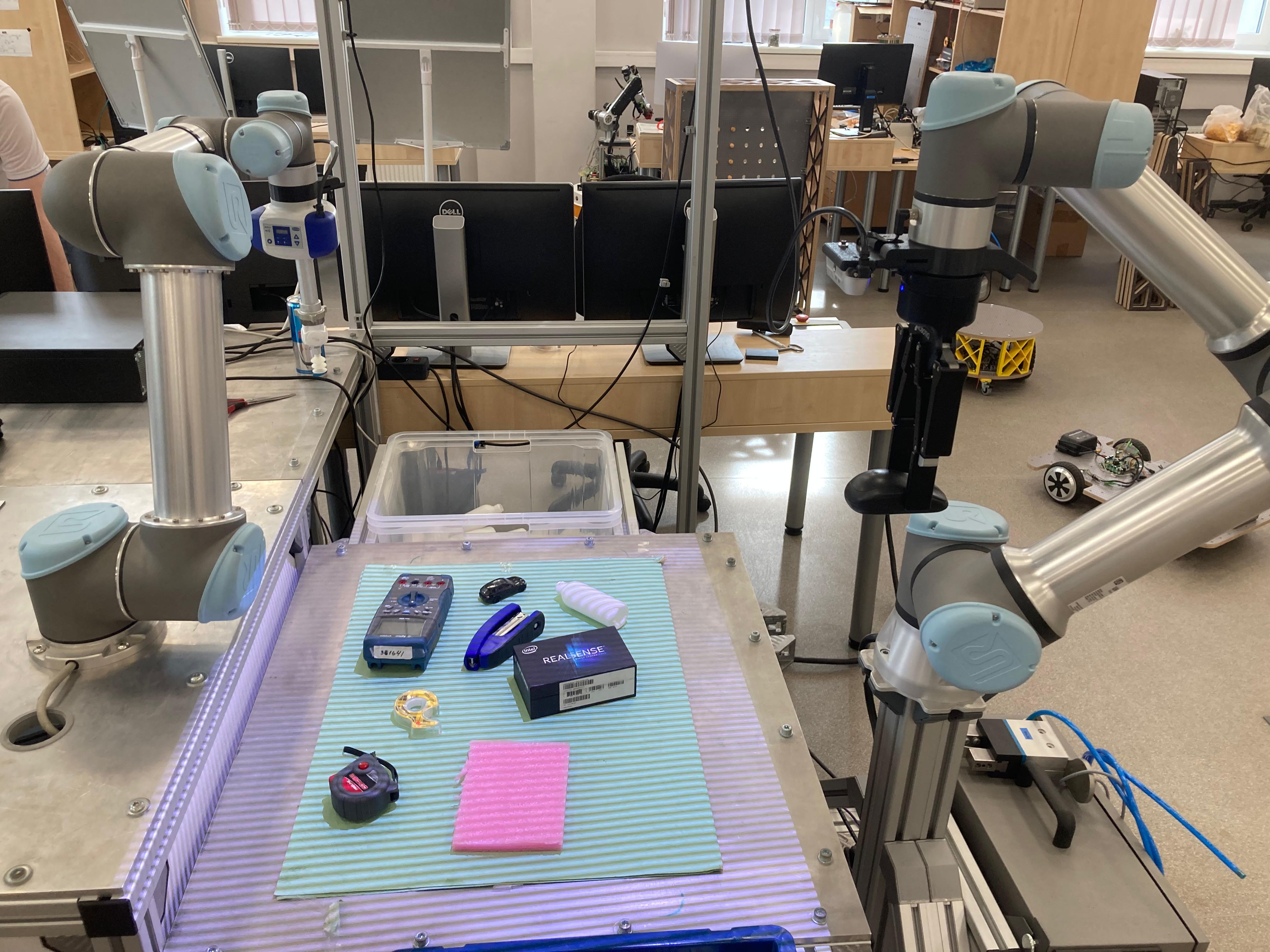
Tabletop manipulation set-up with two robot arms
Cookie Notice: We use Google Maps to show our location. This service uses cookies to provide map functionality. You can decline and view our location via a direct link instead.