Collaborative Robot Workstation
"Tabletop manipulation set-up with two robot arms"
industrial robotics
manipulation
computer vision
NLIP
Category: Testbed
Use Cases: Bin-picking, Manipulation, Industrial robotics
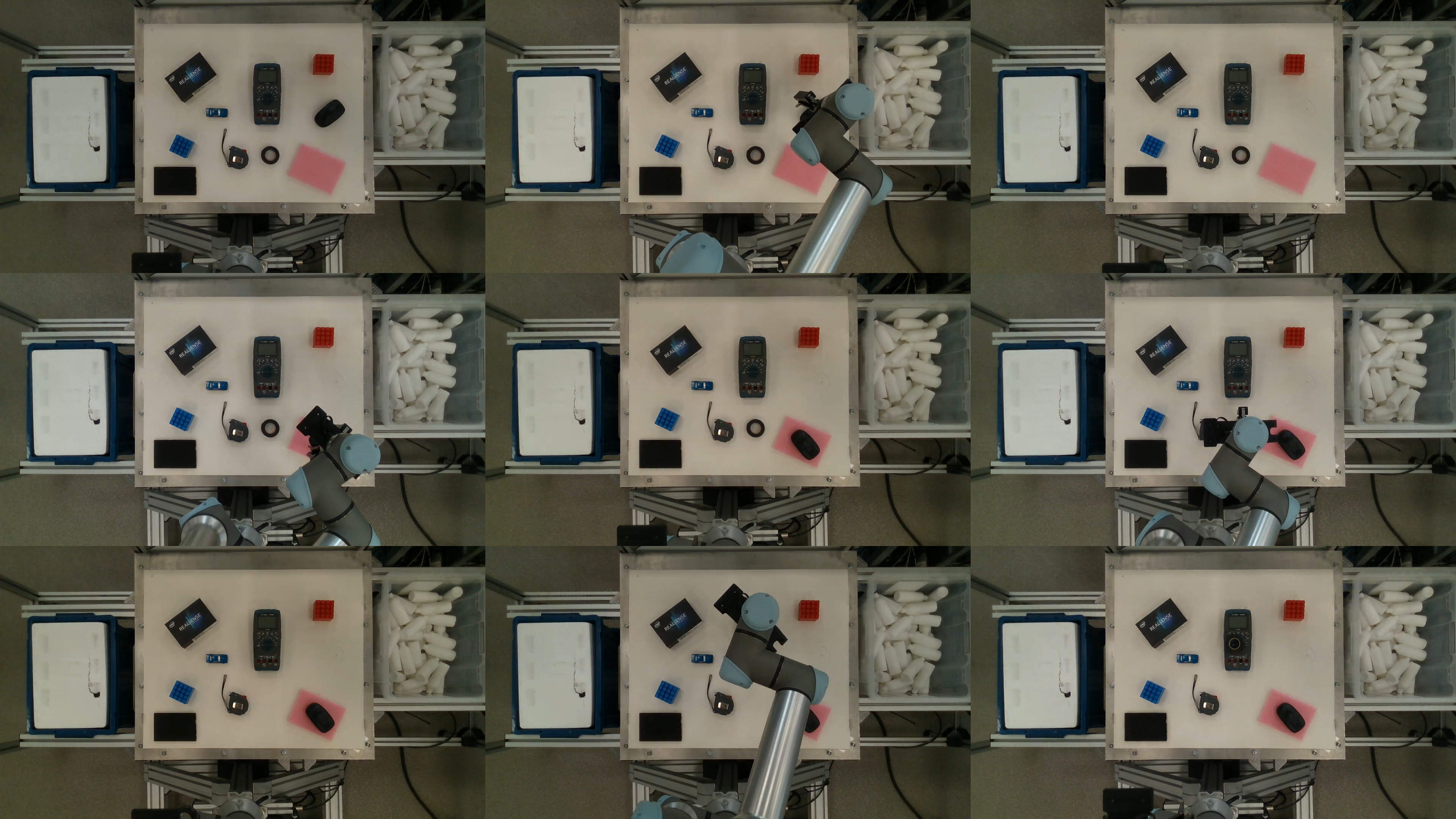
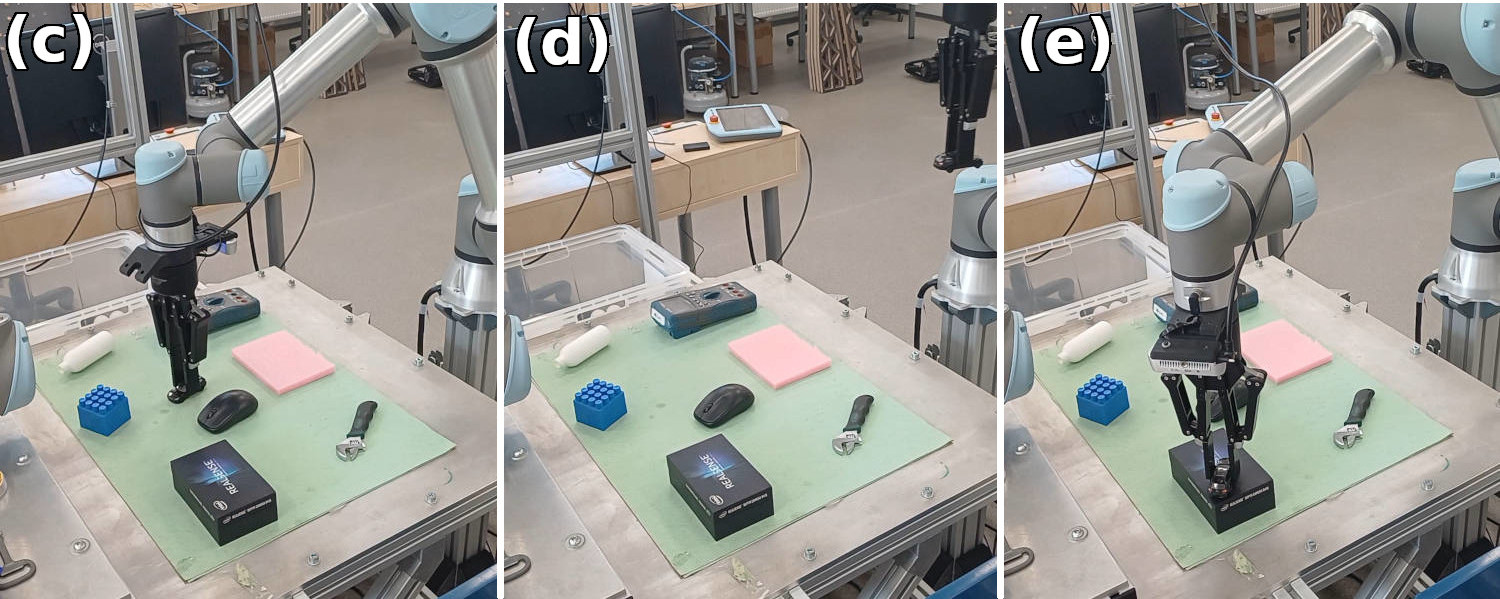
The collaborative robot workstation provides EDI's robotics group with its main testing, verification and validation environment when it comes to industrial robot control. The set-up consists of two UR robot arms, a number of RGB and Depth cameras, and a modular work platform that has been fully modeled for ROS integration.
Key Features
- Robot arms - UR5, UR5e
- RGB-D cameras - Zivid, Realsense
- Demonstrators - computer vision for bin-picking, natural language-based robot control
Use Cases
The robot workstation has been used to demonstrate a number of technologies, the foremost among which are computer vision for bin picking and NLIP.
Gallery